[本站讯]近日,集成电路学院李阳教授团队在Advanced Materials上发表了题为“A labor-division cooperation electronic palm system for high-precision crosstalk-free cognition of pressure and temperature”的文章。集成电路学院李浩为第一作者,李阳教授为通讯作者。
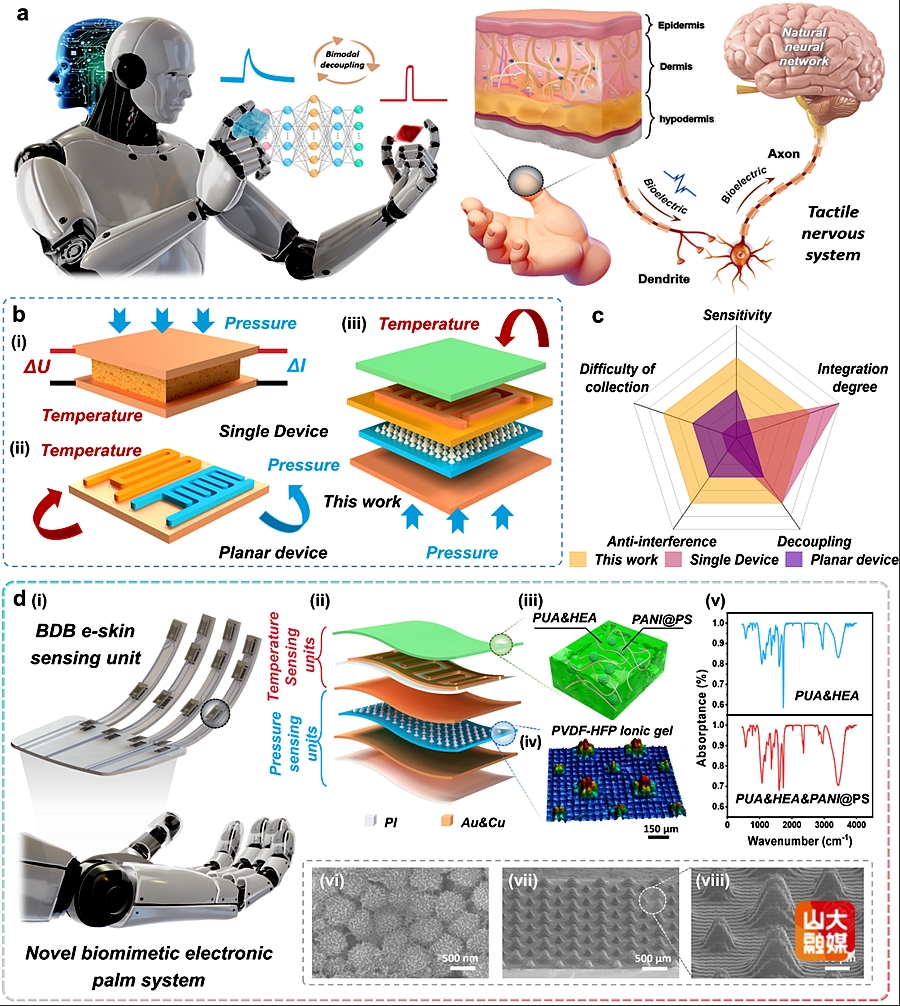
图1 新型仿生电子手掌系统示意图,集成压力-温度BDB电子皮肤
近年来,随着智能机器人、可穿戴设备与人机交互技术的迅速发展,能够像人类手部一样精准感知外界环境的电子皮肤(e-skin)成为研究热点。人手之所以具备卓越的触觉能力,源于皮肤内部多类型、分工明确的感受器——如由梅克尔细胞和帕西尼氏小体实现压力感知,由冷热感受器实现温度感知。这些感受器在有限空间内却互不干扰,并通过独立的神经通路将不同信号精准传递至大脑,构成高效而清晰的“分工式”触觉体系。
研究构建了一种用于温度与压力双模态解耦感知的仿生电子手掌系统(BEPS),由16组双模态解耦仿生(BDB)电子皮肤阵列组成。BDB电子皮肤通过双层柔性印刷电路板结构设计,实现了温度与压力感知单元的高度集成式垂直层叠结构。其中,压力感知单元采用3D打印技术制备的均匀层状微锥结构,实现超高灵敏度的离电压力感知;温度感知单元则使用具有海胆状结构的 PANI@PS 微纳颗粒作为温敏材料,并通过原位光聚合技术使温度敏层的热阻电极与温敏材料紧密接触,确保在温度测量过程中接触电阻不受压力变化影响。此外,基于器件整体特性建立了通用解耦模型,实现了温度与压力双模态信号的无干扰解耦算法。在压力小于30kPa的范围内,BDB电子皮肤表现出线性灵敏度(30.99 kPa-1);在室温至80℃的温度范围内,温度感知表现出超高灵敏度(0.29 K-1)。相比单一器件结构和平面集成架构,所采用的垂直堆叠层状结构在灵敏度、信号获取便利性、解耦能力及抗干扰性方面展现出更均衡的性能,并相较平面器件具有更优异的集成度。同时,为验证系统的无干扰温度感知能力,利用决策树算法实现了对杯中水温与水位的实时识别。基于无干扰压力感知能力,采用卷积神经网络(CNN)对系统中机器人手抓取物体的硬度与形状进行识别。此外,系统还基于同步的温度与压力无干扰感知,实现了仿生手的收缩响应反馈控制。
上述研究工作得到了国家重点研发计划、山东省自然科学基金、泰山学者等项目的资助。