[本站讯]5月8日,作为泰山学堂“高级程序设计”课程的大作业之一,第六届课堂智能车比赛在中心校区举行。
此项赛事以RISC-V开源硬件平台为基础,要求每名学生独立完成一辆智能车模型,实现自主循迹运动等功能。这既是开源生态的实践窗口,又是低门槛的创新实验平台。RISC-V的开放指令集架构(ISA)允许学生深入理解计算机体系结构底层逻辑,通过定制化处理器设计,掌握从芯片指令到系统开发的全链条技术。学生可突破传统教学的限制,自由进行车控算法、传感器融合等实验。从电机驱动到路径规划,需协同硬件设计(如RISC-V SoC)、实时操作系统(RTOS)移植、AI算法部署,培养学生的复杂系统整合能力。这种OBE(成果导向)教学落地、比赛目标驱动的学习模式,倒逼学生自主构建知识网络,教师角色转向技术指导而非单向传授,履行新工科教育的实践理念。

本次比赛的地图为山东大学在济南市的六个校区,包括了一个回旋弯道和两个大弯道。赛题要求采用RISC-V Milk-V Duo开发板,采用7.4V 2A充电电池。学生个人购买材料,可以制造两轮车、三路车、四轮车、履带车等,单车所有材料预算不超过800元。比赛内容包括竞速比赛——中央黑线或者道边黑线寻迹,独立自主(不能遥控)完整走完一圈;技术比赛——避障、冲坡、拐直角弯、红绿灯识别、急停、跟随等;才艺比赛——其他自己设计的智能车特色,如灯光声音等。
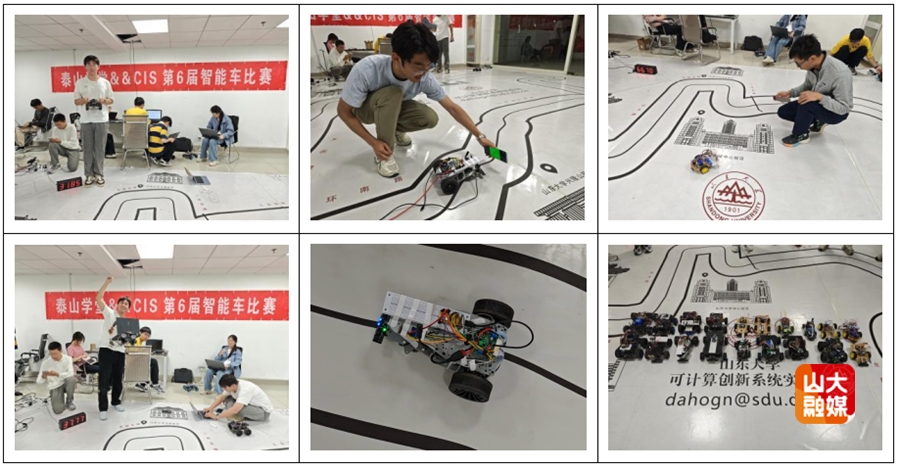
赛前数月,各选手基于RISC-V开源硬件平台,自主完成智能车的机械结构设计、传感器融合算法开发及嵌入式系统调试,为比赛做了充足的准备,现场创新亮点频出:黑线循迹:要求智能车基于传感器数据自主识别路径,部分团队通过RISC-V平台优化图像处理算法,实现毫秒级响应速度。在连续S型弯道中,智能车全程未偏离赛道中心线,且平均速度达0.63m/s,在赛道边缘模糊区域仍保持稳定循迹。遥控竞速:参赛遥控小车基于RISC-V开源硬件平台开发,支持手动遥控操作,通过2.4GHz低延迟通信协议实现实时控制,并配备红外传感器用于基础避障。部分车辆采用双频通信冗余设计,确保复杂环境下操控稳定性,同时可通过电脑端实时监控车辆状态数据。避障追踪:选手通过RISC-V架构优化实时图像处理效率,开发了多模态传感器融合系统,结合超声波雷达与红外摄像头数据,使智能车在动态障碍赛道中响应速度提升30%以上,成功在3秒内完成障碍物定位、路径重规划及执行,实现全程零碰撞和动态追踪。环境感知:选手搭载了双冗余温湿度传感器模块设计的智能车,通过RISC-V架构的SPI接口实现毫秒级数据同步。其独创的动态校准算法,能在高温导致的传感器信号漂移情况下,自动比对两组传感器数据并修正误差,确保传输至电脑终端的温湿度值误差小于±1%。

比赛现场上演了多幕趣味横生的技术花絮。在遥控竞速环节,一位参赛选手右后轮突然脱落,车辆瞬间从“四驱”变“三驱”。某智能车因传感器校准偏差,多次偏离赛道后竟直接冲出赛道,蹭着外道黑线前行,被评委调侃为“跨赛道违规的技术流选手”。一辆避障车因程序逻辑漏洞,将“躲避障碍”判断为“冲出重围”,上演“野蛮冲线”。这些意外瞬间既暴露出工程实践的真实挑战,也展现了学子们面对突发状况的应变能力,成为赛事寓教于乐的生动注脚。
RISC-V架构赋能智能车开发,不仅是学生技术能力的竞技场,更是开源生态与高等教育深度融合的生动案例。此次比赛进一步将开源技术融入课程体系,为学生搭建了“从理论到实践”的桥梁。