[本站讯]近日,空间科学与技术学院卫星导航遥感团队在水下自主导航与多源融合定位领域取得新进展。研究成果以“An INS/DVL/PS Integrated Underwater System Based on NLS-Transformer-LSTM Velocity Prediction Model”为题发表在权威期刊IEEE Internet of Things Journal(中国科学院一区TOP,IF=8.9)。团队博士研究生张新辉为论文第一作者,研究员聂文锋为通讯作者,徐天河教授和特别资助博士后刘杨范为合作者,山东大学为第一完成单位。
海洋是支撑国家资源开发、环境探测、海洋安全和深远海战略能力建设的重要空间。水下运载体长期自主作业高度依赖多源信息协同融合,如何在复杂海况下保持连续、稳定、可靠的导航能力,是国家综合定位导航授时(PNT)体系向海洋空间拓展过程中需要重点解决的技术问题之一。针对水下运载体作业过程中多普勒测速仪异常或中断的问题,团队提出了基于非线性最小二乘、Transformer和长短期记忆网络相结合的速度预测模型。该模型充分利用惯性测量信息、压力传感器深度信息和螺旋桨转速信息,通过非线性最小二乘方法修正复杂流场和机动状态下螺旋桨转速与真实航速之间的动态偏差,进而生成高精度速度观测,在测速信息缺失时为自主水下航行器提供稳定可靠的水下导航信息。
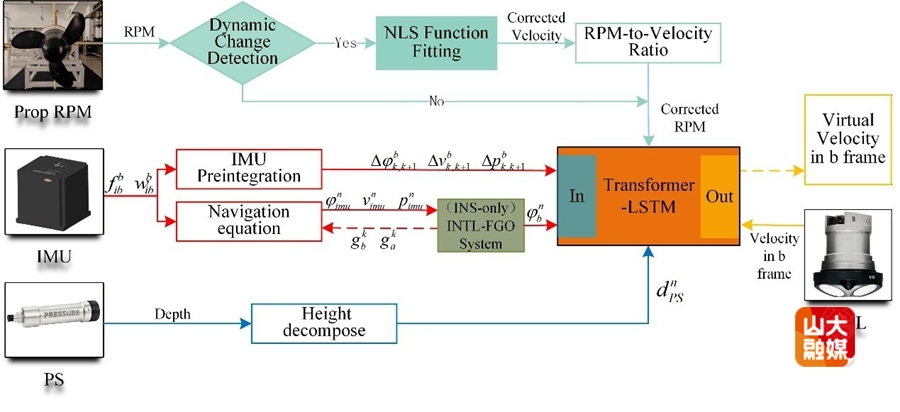
图1 系统流程图
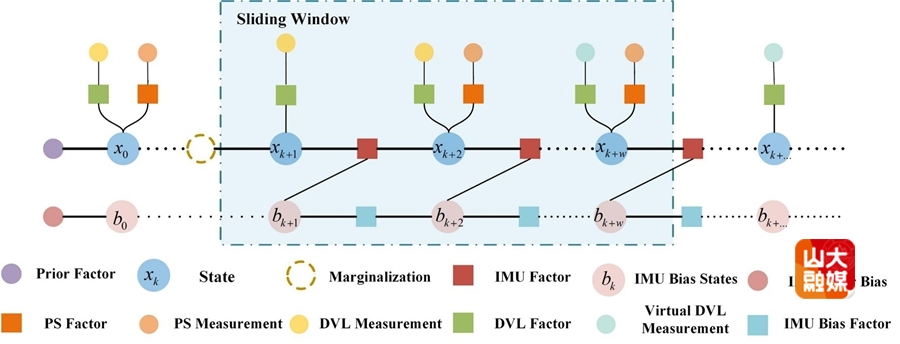
图2 INS/DVL/PS图优化框架
在导航信息融合方面,团队将因子图优化框架系统应用于INS/DVL/PS组合导航系统。该架构能够将惯性测量因子、测速因子、压力传感器因子以及预测生成的伪DVL因子统一纳入优化框架,通过滑动窗口、多时刻联合优化和异常因子抑制,提高复杂动态环境下的状态估计精度和系统鲁棒性。与传统卡尔曼滤波及其改进方法相比,该框架在多源异步信息融合、异常观测处理和非线性优化方面表现出较好的适应性。
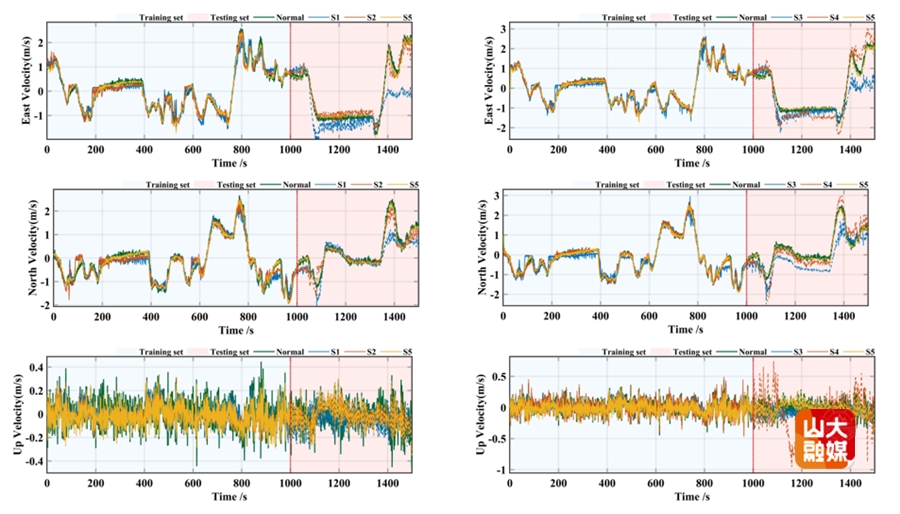
图3 实测AUV轨迹在训练集和测试集上的速度预测精度对比
实验结果表明,所提出的INTL-FGO系统在仿真轨迹和实测AUV轨迹中均表现出较高的导航精度与稳定性。特别是在实测AUV轨迹中,螺旋桨转速经非线性最小二乘修正后精度提升到40.34%,验证了该方法在真实复杂海洋环境中的适应和泛化能力;在DVL观测中断情况下,所提出的NLS-Transformer-LSTM模型能够生成高精度测速信息,有效增强组合导航系统的连续导航能力。
近年来,团队围绕国家综合PNT体系和海洋PNT关键技术建设需求,持续开展水下声学导航定位、多源异质信息融合等方向的基础理论与关键技术研究,承担了国家重点研发计划项目1项,课题2项以及崂山实验室科技创新课题1项等。团队将继续聚焦深远海复杂环境下高精度、高可靠、高连续的PNT技术,持续开展水下导航定位理论方法、核心算法与工程应用研究。
IEEE Internet of Things Journal是物联网领域的国际权威期刊,重点发表物联网、智能感知、多源信息融合与复杂系统应用等方向的高水平研究成果,在国际工程技术与信息科学领域具有重要影响力。该研究得到国家重点研发计划、国家自然科学基金、空间基准国家重点实验室开放基金等项目资助。