[本站讯]近日,机械工程学院国凯教授团队在机械工程领域国际期刊International Journal of Machine Tools and Manufacture(IJMTM)发表研究成果“Towards stable milling: Principle and application of active contact robotic milling”,国凯教授为该文第一作者与通讯作者,山东大学为唯一完成单位。该论文被全球工程领域著名机构Advances in Engineering(AIE)遴选为关键科学文章并进行报道。
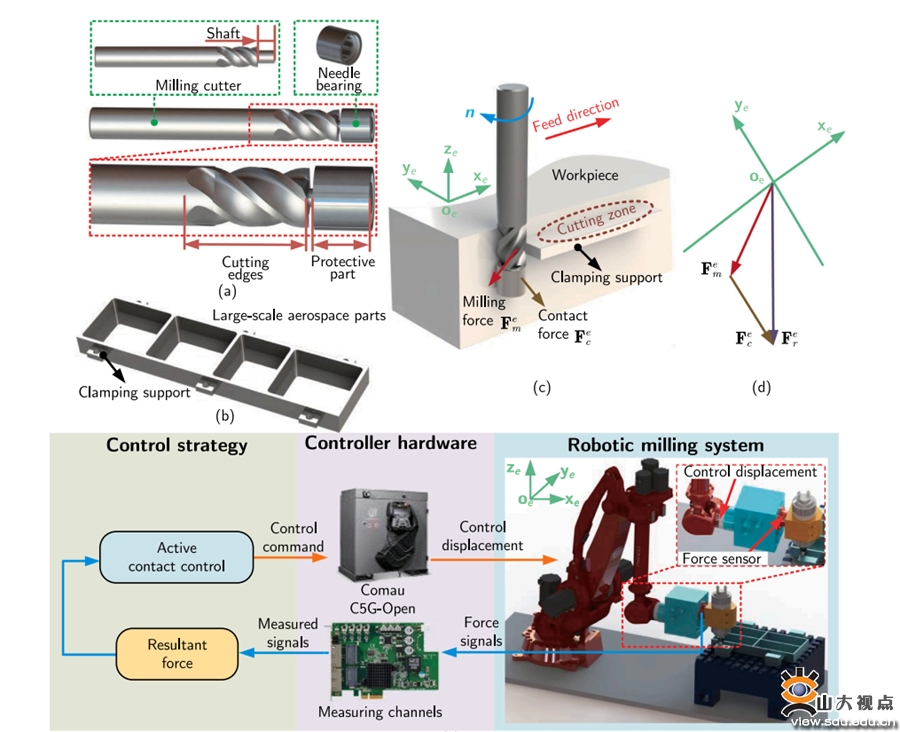
机器人加工已成为航空航天领域的一项重要前沿技术,与传统机床相比,机器人以高灵巧性、高可重构性、低成本的特点在完成大尺寸、定制化、中小批量的结构件加工任务中占据绝对优势。然而,工业机器人的刚性明显低于传统机床,机器人铣削过程中时变冲击载荷极易引发颤振现象,显著降低加工质量。通常,提高机器人铣削稳定性的研究主要通过姿态优化或采用保守铣削参数来减小切削力,严重限制了机器人加工系统的灵活性,同时阻碍生产效率的提升。
本研究提出了一种机器人铣削抑振新原理,即主动接触铣削方法,该方法在机器人和工件之间施加主动接触力,在不牺牲机器人灵活性和加工效率的情况下提升了加工系统的稳定性,避免了加工颤振,同时无需复杂的机器人姿态或铣削参数优化。基于所提出的主动接触铣削方法,研究者开发了一种新型铣刀,并通过理论分析与实验结果证实了方法的有效性。这一方法可以为机器人铣削提供更加广阔的应用前景。
IJMTM被公认为是机械工程领域的权威期刊,中科院1区,在全球130余种机械工程领域SCI收录期刊中排名第三,影响因子10.331。
AIE于2005年在加拿大成立,其主要目的是及时快速地报道工程领域的重要科学研究成果和创新技术,被AIE报道的论文需要具有特殊的科学重要性并能够被广大的科学读者所理解。AIE拥有广泛的读者群,每月的受众科研人员高达85万次。
近年来,国凯教授团队在机器人加工、加工过程监控、非线性机器人控制等领域开展了系统深入的研究工作,取得了系列重要研究进展,相关成果已发表于IJMTM、IEEE TCYB、IEEE TII、IEEE TIE、IEEE TMECH、MSSP等权威期刊。本项研究工作得到了国家自然科学基金、山东省重点研发计划等项目的资助。
文章链接:
https://www.sciencedirect.com/science/article/pii/S0890695522001031
Advances in Engineering(AIE)报道链接:
https://advanceseng.com/stable-milling-principle-application-active-contact-robotic-milling/